SMIT
SMIT
scientific project
Safety-aware Management of robot’s Interruptible Tasks in dynamic environments
Principal Investigator: Wojciech Dudek,
Researchers: Tomasz Winiarski, Maciej Stefańczyk, Daniel Giełdowski,
- A development procedure (SPSysDP) and a meta-model (SPSysML) for Simulation-Physical systems incorporating digital twins and their hardware equivalents (physical twins) SPSysML documentation
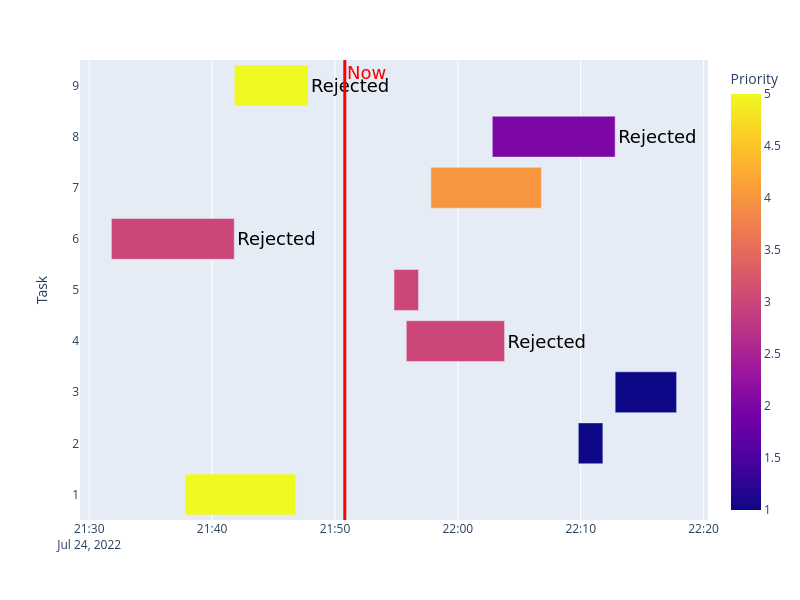
- Example gantt chart of robot tasks
List of selected publications:
- W. Dudek, D. Giełdowski, K. Młodzikowski, D. Belter, and T. Winiarski TaBSA – A framework for training and benchmarking algorithms for scheduling tasks for mobile robots working in dynamic environmentsSoftwareX, p. 102489, 2026[ BIB | DOI | abstract ]
- W. Dudek, N. Miguel, and T. Winiarski A SysML-based language for evaluating the integrity of simulation and physical embodiments of Cyber–Physical systemsRobotics and Autonomous Systems, vol. 185, p. 104884, 2025[ BIB | DOI | abstract ]
- S. Stankevich and W. Dudek Interpreting and learning voice commands with a Large Language Model for a robot systemin Progress in Polish Artificial Intelligence Research, 2024, no. 5, pp. 295–301[ BIB | DOI | abstract ]
- T. Winiarski, W. Dudek, and D. Giełdowski Rico: extended TIAGo robot towards up-to-date social and assistive robot usage scenariosin Progress in Polish Artificial Intelligence Research, 2024, no. 5, pp. 287–294[ BIB | DOI | abstract ]
- T. Winiarski MeROS: SysML-based Metamodel for ROS-based SystemsIEEE Access, vol. 11, pp. 82802–82815, 2023[ BIB | DOI | abstract ]
- W. Dudek, D. Giełowski, M. Stefańczyk, and T. Winiarski Robot Task Management Training Toolchain2023[ BIB | URL ]